
[ad_1]
|
Hearken to this text  |
A analysis venture led by USC laptop science pupil Sumedh A. Sontakke desires to open the door for robots to be caregivers for ageing populations. The group claims the RoboCLIP algorithm, developed with assist from Professor Erdem Biyik and Professor Laurent Itti, permits robots to carry out new duties after only one demonstration.
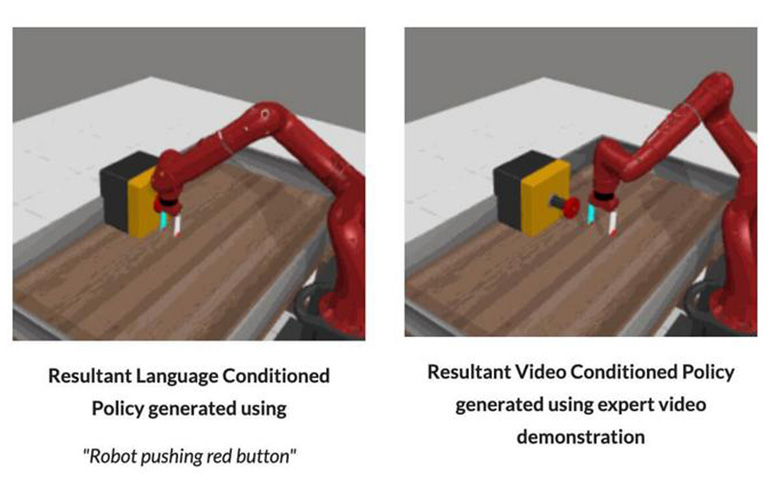
RoboCLIP solely must see one video or textual demonstration of a activity for it to carry out the duty two or thrice higher than different imitation studying (IL) fashions, the group claimed.
“To me, probably the most spectacular factor about RoboCLIP is with the ability to make our robots do one thing based mostly on just one video demonstration or one language description,” stated Biyik, a roboticist who joined USC Viterbi’s Thomas Lord Division of Pc Science in August 2023 and leads the Studying and Interactive Robotic Autonomy Lab (Lira Lab).
The venture began two years in the past when Sontakke realized how a lot knowledge is required to have robots carry out fundamental family duties.
“I began fascinated about family duties like opening doorways and cupboards,” Sontakke stated. “I didn’t like how a lot knowledge I wanted to gather earlier than I may get the robotic to efficiently do the duty I cared about. I wished to keep away from that, and that’s the place this venture got here from.”
How does RoboCLIP work?
Most IL fashions discover ways to full duties by trial and error. The robotic performs the duty over and over to get a reward when it lastly completes the duty. Whereas this may be efficient, it requires huge quantities of time, knowledge, and human supervision to get the robotic to efficiently carry out a brand new activity.
“The massive quantity of information presently required to get a robotic to efficiently do the duty you need it to do isn’t possible in the actual world, the place you need robots that may be taught rapidly with few demonstrations,” Sontakke stated in a launch.
RoboCLIP works in a different way than typical IL fashions, because it incorporates the most recent advances in generative AI and video-language fashions (VLMs). These techniques are pre-trained on giant quantities of video and textual demonstrations, in response to Biyik.
The researchers claimed RoboCLIP performs properly out of the field to carry out family duties, like opening and shutting drawers or cupboards.
“The important thing innovation right here is utilizing the VLM to critically ‘observe’ simulations of the digital robotic babbling round whereas making an attempt to carry out the duty, till sooner or later it begins getting it proper – at that time, the VLM will acknowledge that progress and reward the digital robotic to maintain making an attempt on this path,” Itti stated.
In keeping with Itti, the VLM can inform it’s getting nearer to success when the textual description it creates observing the robotic comes nearer to what the person desires.
“This new sort of closed-loop interplay could be very thrilling to me and can probably have many extra future functions in different domains,” Itti stated.
 Submit your nominations for innovation awards within the 2024 RBR50 awards.
Submit your nominations for innovation awards within the 2024 RBR50 awards.
What’s subsequent?
Sontakke hopes that this system may sometime assist robots look after ageing populations, or result in different functions that would assist anybody. The group says that future analysis can be vital earlier than the system is able to tackle the actual world.
The paper, titled RoboCLIP: One Demonstration is Sufficient to Be taught Robotic Insurance policies, was offered by Sontakke on the thirty seventh Convention on Neural Data Processing Techniques (NeurIPS), Dec. 10-16 in New Orleans.
Collaborating with Sontakke, Biyik and Itti on the RoboCLIP paper have been two USC Viterbi graduates, Sebastien M.R. Arnold, now at Google Analysis, and Karl Pertsch, now at UC Berkeley and Stanford College. Jesse Zhang, a fourth-year Ph.D. candidate in laptop sciences at USC Viterbi, additionally labored on the RoboCLIP venture.
[ad_2]