
[ad_1]
Snails are nice at climbing vertical surfaces, despite the fact that they’ve only a single moist suction-cup foot. A brand new bio-inspired robotic climbs partitions by mimicking that easy but efficient mechanism, though fortunately it leaves a path of water as an alternative of mucus.
Often known as the sliding suction robotic (SSR), the proof-of-concept gadget was created by analysis affiliate Tianqi Yue and colleagues on the College of Bristol. The current model weighs simply 96 grams (3.4 oz) and matches comfortably in an individual’s hand, however the expertise may very well be scaled up as wanted.
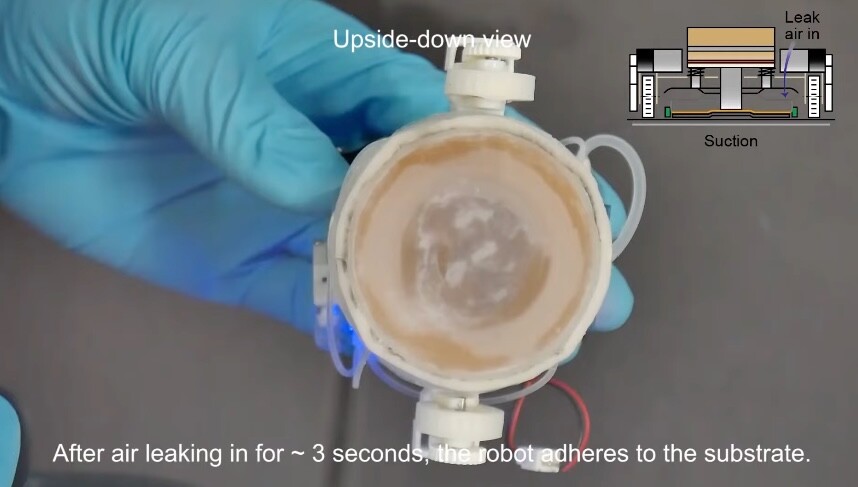
On the underside of the SSR’s rotunda-shaped physique is a 50-mm (2-in)-wide suction cup. That cup is made primarily of sturdy, versatile polyurethane, though its underside consists of a mix of silicone and a hydrophilic (water-attracting) polymer. A hoop of extremely absorbent foam runs across the perimeter of the suction cup.
College of Bristol
The robotic is initially pressed firmly onto a wall by hand. This motion adheres the bot to the wall, however does not permit it to maneuver.
To ensure that that to occur, water is pumped from an onboard tank, by means of 4 silicone tubes and into the froth ring. Capillary motion subsequently attracts the water out of the froth and throughout the underside of the suction cup, forming a skinny layer of liquid that each offers lubrication and maintains the seal.
Two motorized wheels – one on both facet of the suction cup – are then used to propel the robotic throughout the wall. Though some water is left behind on the wall alongside the SSR’s path, that liquid is repeatedly changed to keep up an efficient layer on the underside of the cup. Snails transfer whereas sustaining suction in a lot the identical manner, though they secrete mucus as an alternative of water.
In lab exams, the bot was capable of climb vertical sheets of glass and painted steel at speeds of as much as 19 mm (0.75 in) per second, plus it might rotate on the spot and even transfer fully upside-down throughout the underside of horizontal sheets. It was additionally capable of transport a payload of as much as 200 g (7 oz), and face up to a downward pulling power of 1 kg (2.2 lb).
Primarily based on these exams, the scientists estimate that the SSR ought to have a real-world runtime of roughly one hour per battery-charge. It is essential to notice, the robotic does not use any energy to keep up suction when it isn’t shifting.
Attainable functions for the SSR embrace the inspection and upkeep of wind turbine blades, ships’ hulls, and the home windows of skyscrapers.
“We demonstrated that sliding suction presents low power consumption, excessive adhesion effectivity and security, excessive loading capability and low complexity, whereas solely leaving a quick-to-evaporate water path,” says Tianqi Yue. “Probably the most thrilling discovering of our analysis it that the proposed sliding suction mechanism is a novel clear climbing technique and can considerably advance the event of the next-generation climbing robots.”
A paper on the analysis was lately printed within the journal Nature Communications. You’ll be able to see the SSR in motion (in some circumstances utilizing an exterior water provide) within the video under.
And for one more latest instance of snail-inspired robots, try The Chinese language College of Hong Kong’s robo-snails that cling to at least one one other as a way to collaboratively carry out outside duties.
Mov. 5.4 – Demonstrations of sensible functions
Supply: College of Bristol by way of Newswise
[ad_2]