
[ad_1]
As is the case with some other electrical machine, the much less power {that a} robotic makes use of to carry out its assigned duties, the higher. A brand new mushy robotic gripper was created with this reality in thoughts, because it grasps and releases objects with out utilizing any electrical energy in any respect.
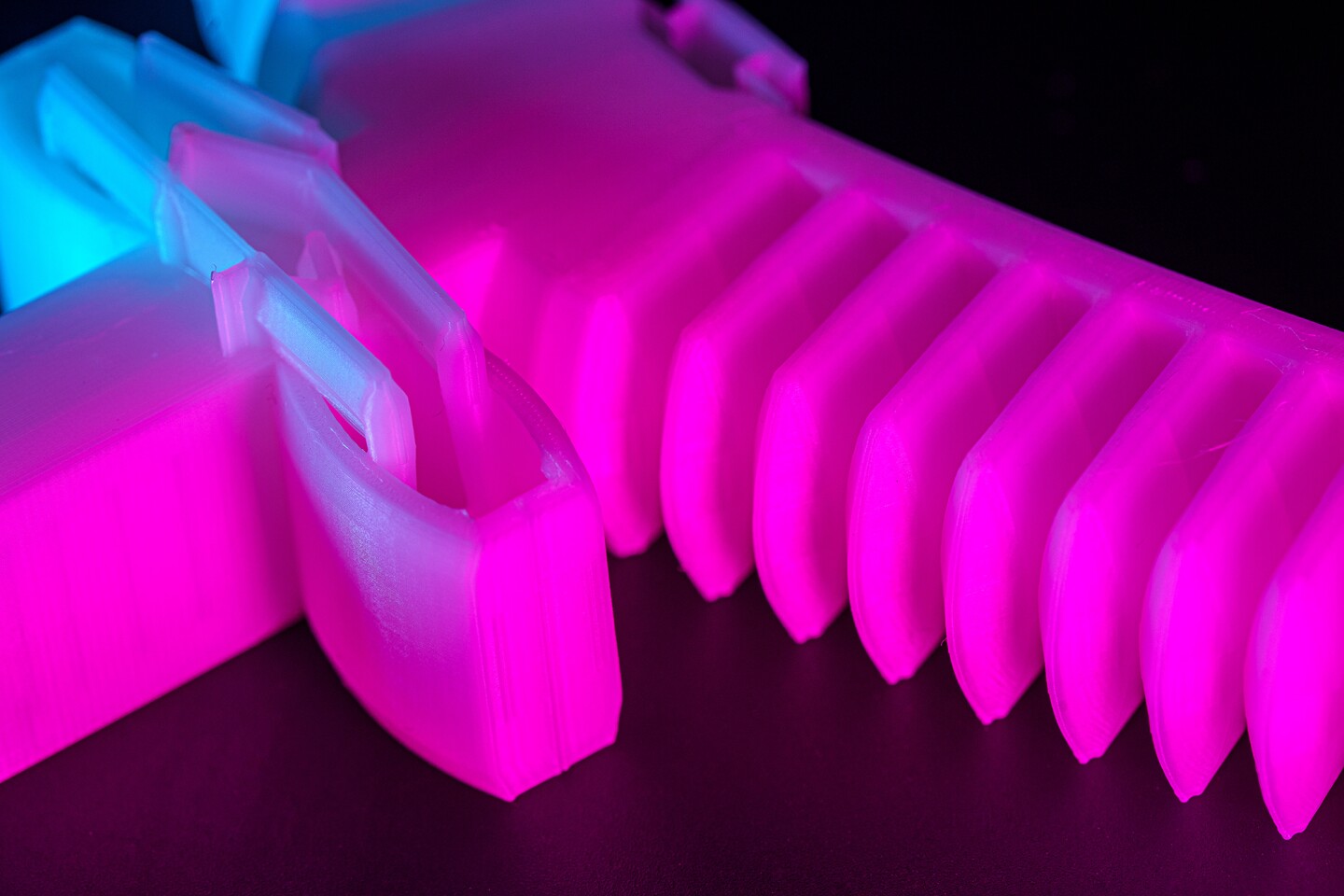
Developed by a group of researchers on the College of California-San Diego, the experimental pneumatic machine is 3D printed multi functional step, so no meeting or different post-print processing is required. It is designed to be mounted on the top of a conventional robotic arm.
So as to decrease the probabilities of leaks that might permit air to flee from it, every layer of the gripper is printed in a single steady line of molten polymer. As a result of that materials is in a molten state because it’s deposited, every layer bonds to the one beneath because it cools.
Though the gripper does not require any electrical energy to function, it does must be hooked as much as a supply of compressed air. That air flows via a rubber hose and into the gripper.
When the center of the machine’s “hand” is pressed down in opposition to an object, the stress causes an inside valve to open. This enables the air to stream via into the 2 bellowed fingers, inflicting them to increase and shut across the object – they keep closed so long as the gripper is in a vertical orientation.
As soon as it is turned sideways (horizontal), nonetheless, the burden of the article causes one other valve to open. The air then flows again out of the fingers, inflicting them to open and launch the article.
UC San Diego
“We designed features so {that a} sequence of valves would permit the gripper to each grip on contact and launch on the proper time,” stated postdoctoral researcher Yichen Zhai, lead creator of a paper on the challenge. “It’s the primary time such a gripper can each grip and launch.”
It’s hoped that the gripper might in the future be used within the dealing with of delicate objects resembling fruit and veggies.
The paper was lately printed within the journal Science Robotics. You may see the gripper in motion, within the following video.
This 3D Printed Gripper Doesn’t Want Electronics To Perform
Supply: UC San Diego
[ad_2]