
[ad_1]
Moreover, Gaussian splatting doesn’t contain any impartial community in any respect. There isn’t even a small MLP, nothing “neural”, a scene is basically only a set of factors in house. This in itself is already an consideration grabber. It’s fairly refreshing to see such a way gaining reputation in our AI-obsessed world with analysis firms chasing fashions comprised of an increasing number of billions of parameters. Its thought stems from “Floor splatting”³ (2001) so it units a cool instance that traditional laptop imaginative and prescient approaches can nonetheless encourage related options. Its easy and express illustration makes Gaussian splatting significantly interpretable, an excellent cause to decide on it over NeRFs for some purposes.
As talked about earlier, in Gaussian splatting a 3D world is represented with a set of 3D factors, actually, tens of millions of them, in a ballpark of 0.5–5 million. Every level is a 3D Gaussian with its personal distinctive parameters which are fitted per scene such that renders of this scene match intently to the recognized dataset pictures. The optimization and rendering processes can be mentioned later so let’s focus for a second on the required parameters.
Every 3D Gaussian is parametrized by:
- Imply μ interpretable as location x, y, z;
- Covariance Σ;
- Opacity σ(), a sigmoid perform is utilized to map the parameter to the [0, 1] interval;
- Shade parameters, both 3 values for (R, G, B) or spherical harmonics (SH) coefficients.
Two teams of parameters right here want additional dialogue, a covariance matrix and SH. There’s a separate part devoted to the latter. As for the covariance, it’s chosen to be anisotropic by design, that’s, not isotropic. Virtually, it signifies that a 3D level will be an ellipsoid rotated and stretched alongside any route in house. It might have required 9 parameters, nevertheless, they can’t be optimized immediately as a result of a covariance matrix has a bodily that means provided that it’s a constructive semi-definite matrix. Utilizing gradient descent for optimization makes it exhausting to pose such constraints on a matrix immediately, that’s the reason it’s factorized as a substitute as follows:

Such factorization is called eigendecomposition of a covariance matrix and will be understood as a configuration of an ellipsoid the place:
- S is a diagonal scaling matrix with 3 parameters for scale;
- R is a 3×3 rotation matrix analytically expressed with 4 quaternions.
The fantastic thing about utilizing Gaussians lies within the two-fold affect of every level. On one hand, every level successfully represents a restricted space in house near its imply, in line with its covariance. However, it has a theoretically infinite extent that means that every Gaussian is outlined on the entire 3D house and will be evaluated for any level. That is nice as a result of throughout optimization it permits gradients to circulation from lengthy distances.⁴
The affect of a 3D Gaussian i on an arbitrary 3D level p in 3D is outlined as follows:

This equation seems to be nearly like a likelihood density perform of the multivariate regular distribution besides the normalization time period with a determinant of covariance is ignored and it’s weighting by the opacity as a substitute.
Picture formation mannequin
Given a set of 3D factors, probably, essentially the most attention-grabbing half is to see how can it’s used for rendering. You is likely to be beforehand acquainted with a point-wise -blending utilized in NeRF. Seems that NeRFs and Gaussian splatting share the identical picture formation mannequin. To see this, let’s take a bit of detour and re-visit the volumetric rendering formulation given in NeRF² and lots of of its follow-up works (1). We may also rewrite it utilizing easy transitions (2):

You may seek advice from the NeRF paper for the definitions of σ and δ however conceptually this may be learn as follows: shade in a picture pixel p is approximated by integrating over samples alongside the ray going by this pixel. The ultimate shade is a weighted sum of colours of 3D factors sampled alongside this ray, down-weighted by transmittance. With this in thoughts, let’s lastly have a look at the picture formation mannequin of Gaussian splatting:

Certainly, formulation (2) and (3) are nearly equivalent. The one distinction is how is computed between the 2. Nevertheless, this small discrepancy seems extraordinarily vital in apply and leads to drastically totally different rendering speeds. The truth is, it’s the muse of the real-time efficiency of Gaussian splatting.
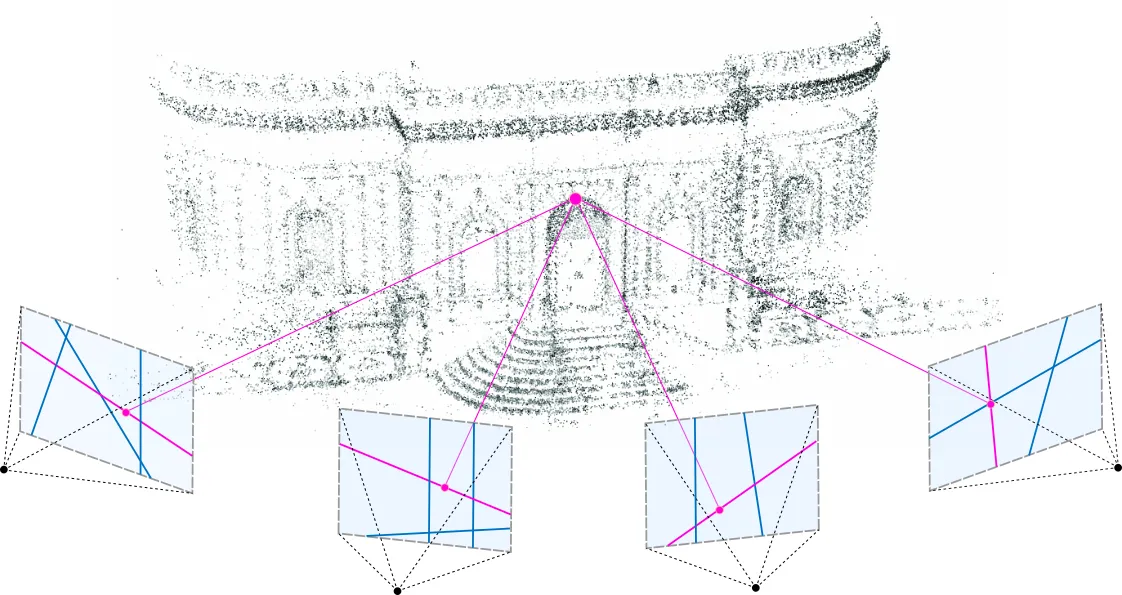
To grasp why that is the case, we have to perceive what f^{2D} means and which computational calls for it poses. This perform is solely a projection of f(p) we noticed within the earlier part into 2D, i.e. onto a picture airplane of the digicam that’s being rendered. Each a 3D level and its projection are multivariate Gaussians so the affect of a projected 2D Gaussian on a pixel will be computed utilizing the identical formulation because the affect of a 3D Gaussian on different factors in 3D (see Determine 3). The one distinction is that the imply μ and covariance Σ have to be projected into 2D which is finished utilizing derivations from EWA splatting⁵.
Means in 2D will be trivially obtained by projecting a vector μ in homogeneous coordinates (with further 1 coordinate) into a picture airplane utilizing an intrinsic digicam matrix Okay and an extrinsic digicam matrix W=[R|t]:

This may be additionally written in a single line as follows:

Right here “z” subscript stands for z-normalization. Covariance in 2D is outlined utilizing a Jacobian of (4), J:

The entire course of stays differentiatable, and that’s in fact essential for optimization.
Rendering
The formulation (3) tells us find out how to get a shade in a single pixel. To render a complete picture, it’s nonetheless essential to traverse by all of the HxW rays, identical to in NeRF, nevertheless, the method is rather more light-weight as a result of:
- For a given digicam, f(p) of every 3D level will be projected into 2D upfront, earlier than iterating over pixels. This fashion, when a Gaussian is mixed for a number of close by pixels, we gained’t must re-project it time and again.
- There’s no MLP to be inferenced H·W·P instances for a single picture, 2D Gaussians are blended onto a picture immediately.
- There’s no ambiguity during which 3D level to guage alongside the ray, no want to decide on a ray sampling technique. A set of 3D factors overlapping the ray of every pixel (see N in (3)) is discrete and stuck after optimization.
- A pre-processing sorting stage is finished as soon as per body, on a GPU, utilizing a customized implementation of differentiable CUDA kernels.
The conceptual distinction will be seen in Determine 4:

The sorting algorithm talked about above is likely one of the contributions of the paper. Its goal is to organize for shade rendering with the formulation (3): sorting of the 3D factors by depth (proximity to a picture airplane) and grouping them by tiles. The primary is required to compute transmittance, and the latter permits to restrict the weighted sum for every pixel to α-blending of the related 3D factors solely (or their 2D projections, to be extra particular). The grouping is achieved utilizing easy 16×16 pixel tiles and is carried out such {that a} Gaussian can land in a number of tiles if it overlaps greater than a single view frustum. Because of sorting, the rendering of every pixel will be diminished to α-blending of pre-ordered factors from the tile the pixel belongs to.

A naive query may come to thoughts: how is it even doable to get a decent-looking picture from a bunch of blobs in house? And nicely, it’s true that if Gaussians aren’t optimized correctly, you’re going to get every kind of pointy artifacts in renders. In Determine 6 you’ll be able to observe an instance of such artifacts, they appear fairly actually like ellipsoids. The important thing to getting good renders is 3 parts: good initialization, differentiable optimization, and adaptive densification.

The initialization refers back to the parameters of 3D factors set at the beginning of coaching. For level places (means), the authors suggest to make use of some extent cloud produced by SfM (Construction from Movement), see Determine 7. The logic is that for any 3D reconstruction, be it with GS, NeRF, or one thing extra traditional, it’s essential to know digicam matrices so you’ll in all probability run SfM anyway to acquire these. Since SfM produces a sparse level cloud as a by-product, why not use it for initialization? In order that’s what the paper suggests. When some extent cloud just isn’t accessible for no matter cause, a random initialization can be utilized as a substitute, below the chance of a possible lack of the ultimate reconstruction high quality.
Covariances are initialized to be isotropic, in different phrases, 3D factors start as spheres. The radiuses are set based mostly on imply distances to neighboring factors such that the 3D world is properly lined and has no “holes”.
After init, a easy Stochastic Gradient Descent is used to suit every thing correctly. The scene is optimized for a loss perform that may be a mixture of L1 and D-SSIM (structural dissimilarity index measure) between a floor reality view and a present render.
Nevertheless, that’s not it, one other essential half stays and that’s adaptive densification. It’s launched every now and then throughout coaching, say, each 100 SGD steps and its goal is to handle under- and over-reconstruction. It’s vital to emphasise that SGD by itself can solely do as a lot as modify the present factors. However it will battle to seek out good parameters in areas that lack factors altogether or have too a lot of them. That’s the place adaptive densification is available in, splitting factors with massive gradients (Determine 8) and eradicating factors which have converged to very low values of α (if some extent is that clear, why hold it?).
Spherical harmonics, SH for brief, play a big position in laptop graphics and had been first proposed as a strategy to study a view-dependant shade of discrete 3D voxels in Plenoxels⁶. View dependence is a nice-to-have property that improves the standard of renders because it permits the mannequin to symbolize non-Lambertian results, e.g. specularities of metallic surfaces. Nevertheless, it’s actually not a should because it’s doable to make a simplification, select to symbolize shade with 3 RGB values, and nonetheless use Gaussian splatting prefer it was carried out in [4]. That’s the reason we’re reviewing this illustration element individually after the entire technique is laid out.
SH are particular capabilities outlined on the floor of a sphere. In different phrases, you’ll be able to consider such a perform for any level on the sphere and get a worth. All of those capabilities are derived from this single formulation by selecting constructive integers for ℓ and −ℓ ≤ m ≤ ℓ, one (ℓ, m) pair per SH:
Whereas a bit intimidating at first, for small values of l this formulation simplifies considerably. The truth is, for ℓ = 1, Y = ~0.282, only a fixed on the entire sphere. Quite the opposite, increased values of ℓ produce extra advanced surfaces. The idea tells us that spherical harmonics kind an orthonormal foundation so every perform outlined on a sphere will be expressed by SH.
That’s why the thought to precise view-dependant shade goes like this: let’s restrict ourselves to a sure diploma of freedom ℓ_max and say that every shade (pink, inexperienced, and blue) is a linear mixture of the primary ℓ_max SH capabilities. For each 3D Gaussian, we need to study the proper coefficients in order that after we have a look at this 3D level from a sure route it’ll convey a shade the closest to the bottom reality one. The entire technique of acquiring a view-dependant shade will be seen in Determine 9.

Regardless of the general nice outcomes and the spectacular rendering pace, the simplicity of the illustration comes with a worth. Essentially the most vital consideration is varied regularization heuristics which are launched throughout optimization to protect the mannequin in opposition to “damaged” Gaussians: factors which are too huge, too lengthy, redundant, and so on. This half is essential and the talked about points will be additional amplified in duties past novel view rendering.
The selection to step other than a steady illustration in favor of a discrete one signifies that the inductive bias of MLPs is misplaced. In NeRFs, an MLP performs an implicit interpolation and smoothes out doable inconsistencies between given views, whereas 3D Gaussians are extra delicate, main again to the issue described above.
Moreover, Gaussian splatting just isn’t free from some well-known artifacts current in NeRFs which they each inherit from the shared picture formation mannequin: decrease high quality in much less seen or unseen areas, floaters near a picture airplane, and so on.
The file measurement of a checkpoint is one other property to bear in mind, regardless that novel view rendering is much from being deployed to edge gadgets. Contemplating the ballpark variety of 3D factors and the MLP architectures of fashionable NeRFs, each take the identical order of magnitude of disk house, with GS being just some instances heavier on common.
No weblog submit can do justice to a way in addition to simply working it and seeing the outcomes for your self. Right here is the place you’ll be able to mess around:
- gaussian-splatting — the official implementation with customized CUDA kernels;
- nerfstudio —sure, Gaussian splatting in nerfstudio. This can be a framework initially devoted to NeRF-like fashions however since December, ‘23, it additionally helps GS;
- threestudio-3dgs — an extension for threestudio, one other cross-model framework. You need to use this one if you’re involved in producing 3D fashions from a immediate moderately than studying an present set of pictures;
- UnityGaussianSplatting — if Unity is your factor, you’ll be able to port a skilled mannequin into this plugin for visualization;
- gsplat — a library for CUDA-accelerated rasterization of Gaussians that branched out of nerfstudio. It may be used for unbiased torch-based initiatives as a differentiatable module for splatting.
Have enjoyable!
This weblog submit relies on a bunch assembly within the lab of Dr. Tali Dekel. Particular thanks go to Michal Geyer for the discussions of the paper and to the authors of [4] for a coherent abstract of Gaussian splatting.
- Kerbl, B., Kopanas, G., Leimkühler, T., & Drettakis, G. (2023). 3D Gaussian Splatting for Actual-Time Radiance Subject Rendering. SIGGRAPH 2023.
- Mildenhall, B., Srinivasan, P. P., Tancik, M., Barron, J. T., Ramamoorthi, R., & Ng, R. (2020). NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis. ECCV 2020.
- Zwicker, M., Pfister, H., van Baar, J., & Gross, M. (2001). Floor Splatting. SIGGRAPH 2001
- Luiten, J., Kopanas, G., Leibe, B., & Ramanan, D. (2023). Dynamic 3D Gaussians: Monitoring by Persistent Dynamic View Synthesis. Worldwide Convention on 3D Imaginative and prescient.
- Zwicker, M., Pfister, H., van Baar, J., & Gross, M. (2001). EWA Quantity Splatting. IEEE Visualization 2001.
- Yu, A., Fridovich-Keil, S., Tancik, M., Chen, Q., Recht, B., & Kanazawa, A. (2023). Plenoxels: Radiance Fields with out Neural Networks. CVPR 2022.
[ad_2]